Master Thesis Peicheng Guo
Towards an active predictive relation by reconceptualizing a vacuum robot
This is a reprint of the executive summary from the thesis
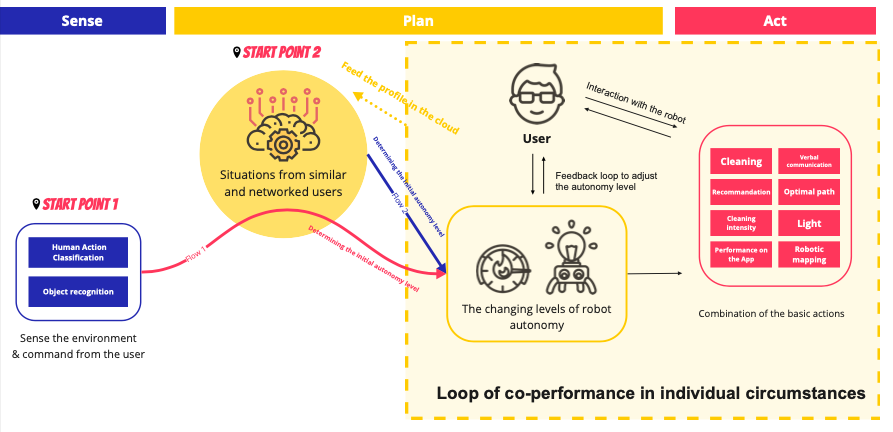
Things are becoming connected, such as electronic consumer products, being able to connect to each other through the Internet, and can interact without human interference (Rowland et al., 2015). By implementing sensors, things can exchange data and combine products to a decentralized system. With the development of Artificial intelligence and Machine learning capabilities, the connected objects are extended with predictive capabilities, and the character of things is changed to “things that predict” (Smit, 2021). If a connected device is able to embrace a predictive system that not only profiles for scripted behavior but could also use the knowledge co-created by all the other similar devices and their users that encounter similar situations, the predictions can be generated based on that. In this case, a new type of interplay between humans and things called “predictive relation” is created.
However, now the relation we have with the connected objects, cannot be the ‘background relation’ that meets the requirement when the interplay is linking to the future. Challenges such as the transparency and users’ acceptance of predictive behavior of the everyday connected product still require us to figure out before the future takes place. It is urged to have an active and valid dialogue to understand the now and the future, and this leads to the question: ‘how to design transparent and acceptable predictive relations for the things that predict?’ Therefore, to investigate the question, the project will explore the predictive relations and identify the design qualities for predictive relations between humans and things by taking the XiaoMi’s Vacuum robot as the starting point of the case study.
This article will start with a brief introduction of the definition of “Things that predict”, explaining the predictive knowledge and relations and leading to the research questions and approaches of this project.
The project will first dive into the investigation of the intelligence of the current vacuum robots through the literature review and observation, focusing on robot autonomy, one of the most relevant aspects of robot’s intelligence in the field of human-robot interaction (HRI). After deconstructing the intelligence and investigating the interaction of the current vacuum robot, it is observed that 1) The interaction on the APP plays a crucial part and the verbal control or direct interplay with robots is limited. 2) Most of the plan-making and decision-making are highly dependent on humans. 3) The autonomy levels of the current vacuum robot range from manual to full autonomy, but referring to the taxonomy (Beer et al., 2014) developed by Beer’s research team, it only occupies 5 of the levels.
After researching the autonomy levels of the tasks and outlining the interaction of the current vacuum robot, the creative sessions (Chapter 3) are conducted to dive deep into the context of the user and the vacuum robot to envision what kind of capabilities can be applied to the vacuum robot as predictive capabilities. The findings and insights from the creative sessions are synthesized into the design qualities in 4 dimensions (Practical, Symbolic, Cognitive, and Social) for the acceptance of predicting vacuum robots. Besides, a wireframe of generating predictive behavior is proposed, indicating how a predictive behavior will be triggered and developed in the individual’s context and leading to the set up of 2 propositions for transparency and acceptance. The 2 propositions are evaluated (Chapter 5) through the method of ‘Wizard-of-oz’ and proved valid by combining the results of quantitative and qualitative research.
As one of the results of the evaluation, this project also proposes the idea of “Designer as the facilitator of the human-robot collaboration”. The designers can be the ones who help to bring in the background knowledge and the patterns of the predictive relation and indicate the ways for humans and robots to co-perform reliable and meaningful daily practice in their partnership. Eventually, this project takes designing a guidebook as one of the ways to clarify the idea and integrates the main results of the project into the guidebook to facilitate the collaboration between humans and predicting robots.
Peicheng did a great job enhancing the design of things that predicts with new models, specifically for smart home products.
Find Peicheng Guo projects on the repository of Industrial Design Engineering, or download the thesis, the guidebook, and poster.